




A New Era in Ballbot Technology with Adaptive Control
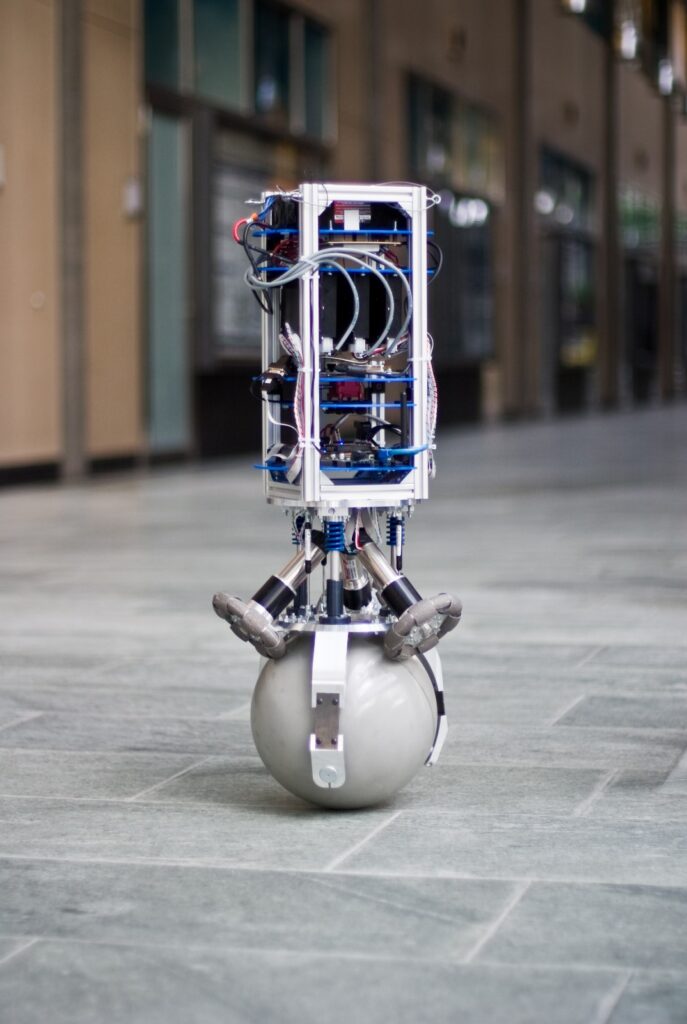
Ballbots, known for their omnidirectional movement, face complex stability challenges. Traditional PID controllers struggle, while sliding mode control often causes chattering. To address this, a research team led by Dr. Van-Truong Nguyen developed an Adaptive Nonlinear PID-RBFNN (NPID-RBFNN) Controller, integrating a radial basis function neural network (RBFNN) with a PID controller for enhanced stability and adaptability. This breakthrough marks a new era in ballbot technology with adaptive control.
🔹 Key Benefits of the NPID-RBFNN Controller:
✔ Lightweight computation
✔ Superior stability & reduced chattering
✔ High resilience to external forces
The study, validated using Lyapunov theory, demonstrated better performance than traditional controllers in simulations and real-world tests.
🔹 Future Applications:
✅ Assistive robots – Navigate complex environments with precision
✅ Service robots – Operate in dynamic spaces like hospitals and airports
✅ Delivery robots – Adapt to wind, uneven terrain, and external disturbances
This innovation aligns with sustainable robotics, optimizing energy use and long-term reliability. With continued research, self-learning robots are set to revolutionize industries like logistics, healthcare, and retail.
🔗 Original Article: 10.1016/j.jestch.2024.101914
📅 Published: Jan 1, 2025, Engineering Science and Technology, an International Journal